No. 004 · Mobility · AMR(自律走行ロボット)
Noruno Go1
アイデアに、機動力を。現場で試せる、小さくてタフな相棒。SLAM自律走行からROSベースの拡張まで、開発者の想いをそのまま形にするモバイルロボットです。
01 — Vision
開発者の、想い。
理想の検証には、妥協のない「足回り」が必要だった。
ロボット開発の現場では、アイデアはあっても「動かせるプラットフォーム」が足りない。高価すぎる研究用機器と、性能不足のホビー機の間にある空白を埋めるために Noruno Go1 は生まれました。
AI・LiDAR・ROS——最前線の技術をすぐに載せられる拡張性と、現場で使い倒せる実用性を両立。「まず動かしてみる」をより小さなコストで実現します。
02 — Functions
標準搭載、4つの走行モード。
01 · SLAM
地図生成型自律走行
LiDARで環境地図をリアルタイム生成。指定した目的地へ自律移動します。
02 · Scan Replay
スキャンリプレイ(経路追従)
事前に記録した経路を正確にトレース。繰り返し作業の自動化に最適です。
03 · Target Track
ターゲットトラック(追従走行)
特定のターゲットを検知・追従。人や物体のフォローユースケースに対応します。
04 · Manual
ジョイパッド手動操縦
ワイヤレスジョイパッドで直感的な手動操縦。デモ・検証・緊急時に。
03 — Specifications
製品スペック。
— 本体 / Body
| 外形寸法 | 600 × 480 × 200 mm(L × W × H) |
|---|---|
| 本体重量 | 約18 kg(バッテリー込み) |
| 最大積載量 | 70 kg |
| 上部搭載面サイズ | 500 × 480 mm |
| 想定使用環境 | 屋内 |
| 動作環境温度 | 0℃〜45℃ |
| 防塵・防水 | ― |
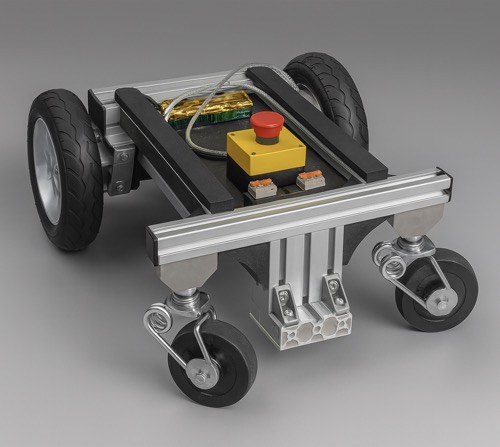
— 駆動 / Drive
| 駆動方式 | 後輪2輪差動駆動 + 前輪キャスター |
|---|---|
| モーター | 8インチ DCブラシレス ギアードハブモーター × 2 |
| モーター出力 | 180 W × 2 |
| 電磁ブレーキ | あり(3 N·m) |
| 後輪ホイール径 | 8インチ(約200 mm) |
| トレッド幅 | 380 mm |
| 最高速度 | 1.5 m/s(5.4 km/h) |
| 段差乗り越え | 2 cm |
— 電源 / Power
| 動作電圧 | DC 24 V |
|---|---|
| バッテリー | 鉛蓄電池 12 Ah × 2 |
| 充電電流 | 3 A |
| 充電時間 | 約4時間(理論値) |
| バッテリー交換 | ユーザーによる分解で交換可能 |
| 電源出力 | 24 V / 12 V / 5 V |
— ソフトウェア / Software
| ベースシステム | ROSベース |
|---|---|
| LiDAR | 自律走行用2D LiDAR標準搭載(ROS対応2D/3D LiDAR追加搭載可能) |
| 自律走行ノード | SLAM機能 · スキャンリプレイ機能 · ターゲットトラック機能 |
| 手動操縦 | 無線ジョイパッド操縦機能 |
— 通信・I/O / Communication
| 無線通信 | Wi-Fi / Bluetooth / LTE(外部ルーター搭載で対応可能) |
|---|---|
| 有線通信 | Ethernet |
| 外部ポート | 非常停止入力 · エンコーダ入力 · IO入出力 |
— オプション / Options
| バッテリー | LiFePO4バッテリー(24 V 15 Ah · 5 A充電) |
|---|---|
| 駆動系 | 前輪オムニホイール(150 mm)※小回り・精密旋回向け |
| 安全機能 | 物理バンパーセンサ(前方) |
| 非常停止ボタン | |
| 遠隔操作 | 遠隔操作用ジョイパッド |
| 遠隔操縦用カメラ | |
| 遠隔操作映像配信機能 | |
| その他 | 音声出力スピーカー |
— 保証 / Warranty
| 保証期間 | 1年 |
|---|---|
| サポート体制 | 導入サポートあり(開発事業者向け) |
| 受注形態 | 受託開発・受注生産品 — 仕様・価格はお問い合わせください |
04 — Use Case
採用事例。
実際に使われている現場Use Case 001 · 大手インフラ企業 整備場
整備場点検の研究開発用プラットフォームとして、活用された。
等間隔に柱が連続する狭隘な整備場内での自律点検研究に、Noruno Go1 が研究開発用ベース台車として活用された。カメラを積載したまま高速走行し、柱を確実に回避する——安全性が厳しく求められる特殊環境向けのオリジナル走行アルゴリズムを実装できるプラットフォームとして、研究開発の土台を担った。
大手インフラ企業
整備場
カメラ搭載
カスタムアルゴリズム
狭隘環境対応
研究開発活用
※ 社名・詳細は秘密保持契約により非公開